History of pid controller pdf
History of pid controller pdf
TWO DEGREE OF FREEDOM PID CONTROLLER DESIGN USING GENETIC ALGORITHMS DANIEL CZARKOWSKI , TOM O’MAHONY Polish Register of Shipping, Electrical and Automation Department,
A Brief History of the PID How a tinkering home barista revolutionized the coffee industry The PID controller is one of the most impactful technological advances …
Implementing a PID Controller Using a PIC18 MCU. AN937 DS00937A-page 2 2004 Microchip Technology Inc. OBJECTIVES The objectives for this application note are to: • discuss in detail the three elements of a PID Controller: Proportional, Integral and Derivative • discuss a firmware PID routine on a PIC18 device • discuss the implementation of a firmware-based PID that has the …
Part I: Discrete PID Gains as Functions of Sampling Time. In our previous article Digital PID Controllers, we discussed some basics of PID controller implementation as software algorithm on a …
used in the field of instrumentation and control (Automation) The P&ID is used to by field techs, engineers, and operators to better understand the process …
Optimized PID tracking controller for piezoelectric hysteretic actuator model the input at the present time but also the operational history of the system considered. Fundamental study of piezoelectric actuator depicts that the hysteresis effect deteriorate the tracking per- formance of the piezoelectric actuator. It severely limits systems’ performance such as increasing the time of
Software PID Control of an Inverted Pendulum Using the PIC16F684. AN964 DS00964A-page 2 2004 Microchip Technology Inc. BASE PLATFORM The base platform is a 3-point platform, 2 wheels (one of which is geared and attached to a DC motor) and an audio jack. When the DC motor is turned on, the base platform will rotate around in a circle with the center of the axis of rotation being the audio jack
PLC-5/VME VMEbus Programmable Controllers User Manual for more information. 3URWHFWHG3/& SU RFHVVRUVDORQHGRQRWHQVXUH3/& VVWHPVHFXULW 6VWHPVHFXULWLVDFRPELQDWLRQRI
Multi Loop Control for Industrial Automation What is a Multi Loop Temperature and Process Controller? Multi loop controllers are used to control a thermal or process machine in systems which need more than one control loop within a single system.
The PID controller has been widely used over the past five decades and it is the most commonly used control system which has longest history. However, now a day also this method is extensively in used .Simplicity, robustness, and effectiveness are some properties of the Proportional-Integral-Derivative (PID) controllers .They are not susceptible to environmental noise and very easy to
Slide 9 of 9
MOTOR SPEED CONTROLLER FOR DIFFERENTIAL WHEELED

3-Point Stepper Control with PID 3Step Siemens AG
PID controller based walking, the LCNN controller was trained to generate a torque depending on the current three joint angles and the three reaction force components on the tip of a given leg.
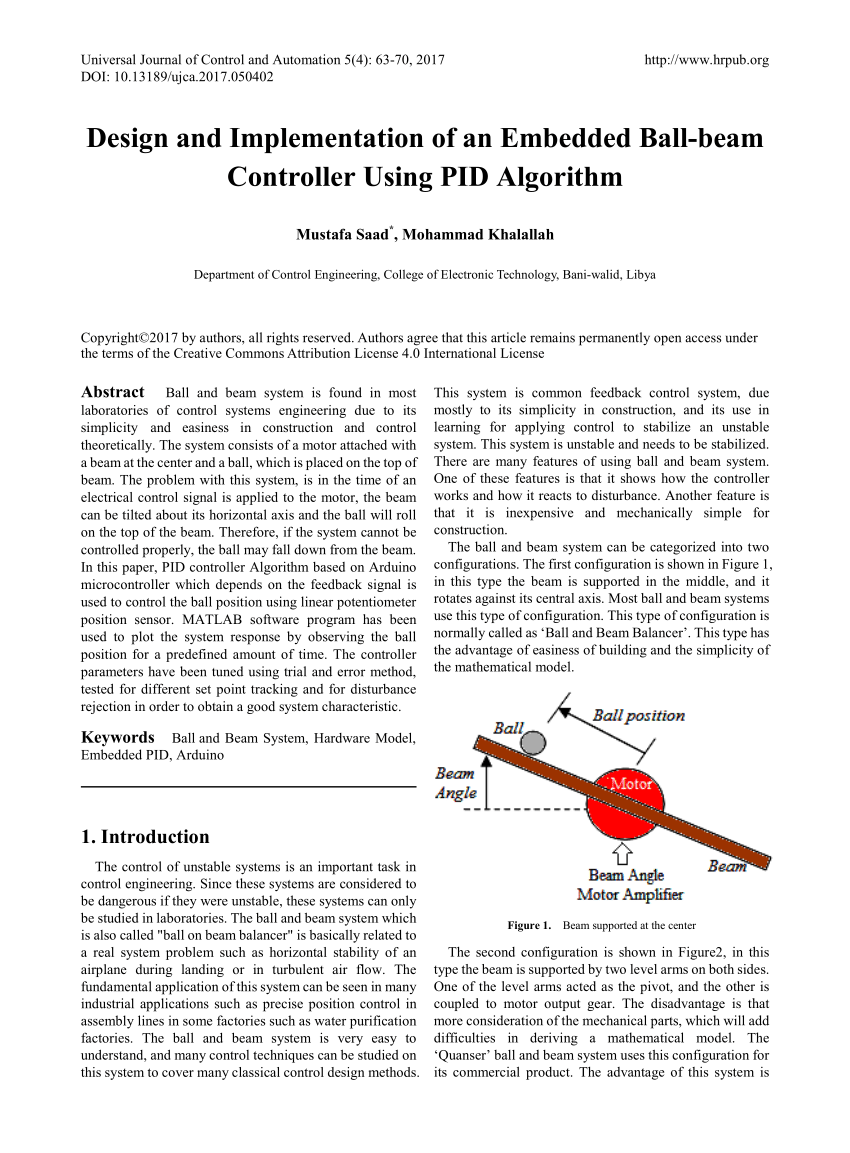
The alternative to a closed loop control scheme such as the PID controller is an open loop controller. Open loop control (no feedback) is in many cases not satisfactory, and is often impossible due to the system properties. By adding feedback from the system output, performance can be improved [6].
The inverted Pendulum: A fundamental Benchmark in Control Theory and Robotics Olfa Boubaker National Institute of Applied Sciences and Technology
In the early history of automatic process control the PID controller was implemented as a mechanical device in steering system of Ships PID temperature controllers are applied in industrial ovens, plastics injection machinery, hot stamping machines and packing industry.
feedback controller. • Tune a digital PID . Outline of the lesson. • Brief history of control equipment • Sampling the measurement • Digital PID calculation • Effect of digital execution period on tuning and performance CHAPTER 11: DIGITAL CONTROL. CHAPTER 11: DIGITAL CONTROL A BRIEF HISTORY OF PROCESS CONTROL • A little history helps us to understand the common …
The PID controller can be used in a graphical mode by invoking the PID Controller widget and using function pid controller widget(). In the graphical mode all parameters are set by choosing corresponding options. The proportional, integral and derivative gains can be entered manually or they can be determined by auto-tuning. The auto-tuning is based on the Ziegler–Nichols method, with the
491 Racing Vehicle Control Systems using PID Controllers Nic Melder and Simon Tomlinson 40 40.1 Introduction A control system is defined as the entirety of the mechanical, physical, or digital machinery,
A Fuzzy Controller for Blood Glucose-Insulin System 113. the gut into the circulatory system [4]. An exercise model was used to incorporate the effects of exercise on glucose
1 An Abbreviated History of Automation & Industrial Controls Systems and to calculate solutions for the proper corrective action from the controller that results in system stability, i.e., the system will hold the set point and not oscillate around it. There are two major schools of practice in control theory: classical and modern. Classical control theory is limited to single-input and
EZ-ZONE ® PM . The EZ-ZONE®PM panel mount controller offers control options that reduce system complexity and thermal loop ownership cost. It can be ordered as a PID controller, an over/under limit controller or its functions can be combined into an integrated controller.

1. Introduction. Currently, fractional order controllers are being extensively used by many scientists in order to achieve the most robust performance of the systems , , , , , . The fractional PID controller was introduced by I. Podlubny in 1994 for a fractional order system.
1 Basics of PID Control 1.1 Introduction A Proportional–Integral–Derivative(PID) controlleris a three-termcontroller that has a long history in the automatic control field, starting from the be-
proportional-integral-derivative (pid) controller Due to the prevalence of pulse encoders for system state information, an all- digital proportional-integral-derivative (ADPID) is proposed as an alternative to
Applications & Tools Answers for industry. Cover 3-Point Stepper Control with PID 3Step SIMATIC S7-1500 Application Description May 2013
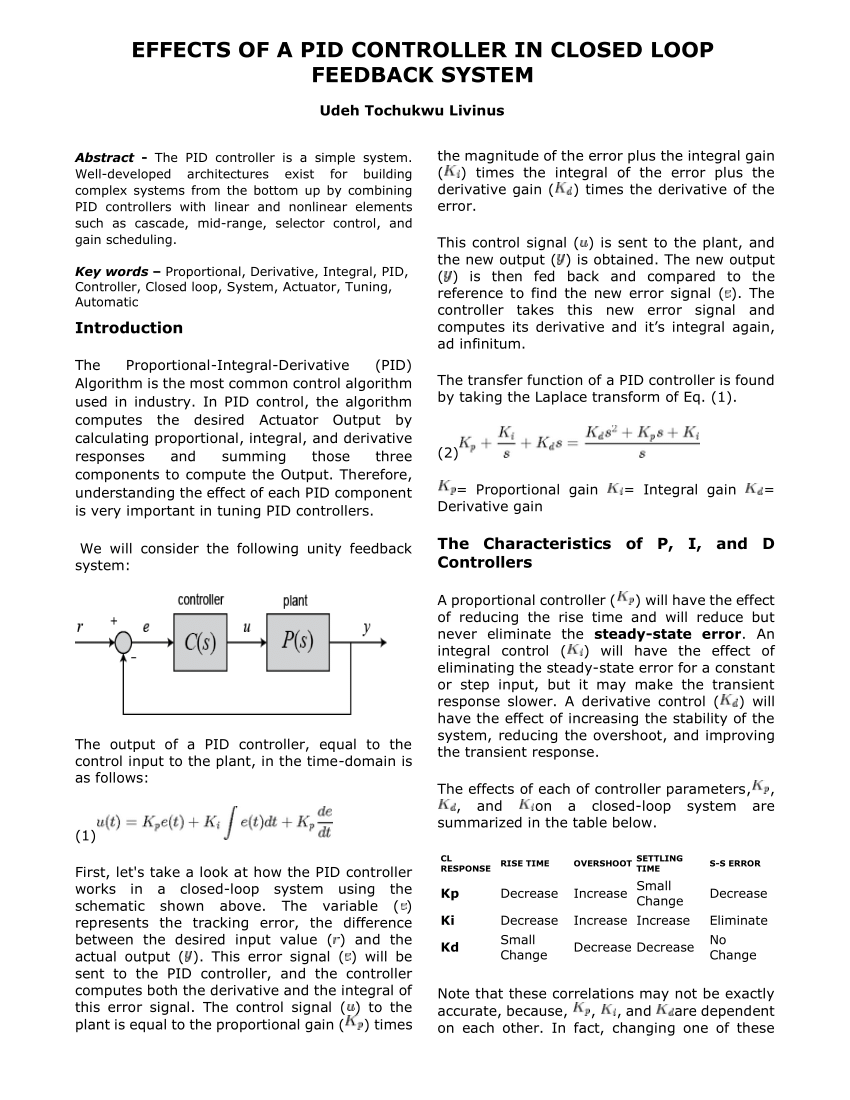
The PID controller is a simple system. Well-developed architectures exist for building complex systems from the bottom up by combining PID controllers with linear and nonlinear elements such as
Implementation of FPGA based PID Controller for DC Motor Speed Control System Prashant Kumar#1, Ravi Mishra*2 1#M.E. It has a long history of development and very mature tuning rules. overall, the PID is an important tool for the embedded real time digital control designer. They are usually implemented either in hardware using analog components or in software using computer-based …
Outline of the lesson. • General Features and history of PID • Model of the Process and controller – the Block Diagram • The Three Modes with features
Looking into the distant past of automation history, one can see the underlying concept of a PID controller exhibited in a nineteenth-century steam engine governor design, with the first real PID-type controller developed by Elmer Sperry in 1911.
Throughout the development history of control system, PID controller is very popular because it is very easy to apply and can work well in a wide range of operating conditions [10]. Besides that, PID controller has clear effects of each proportional, integral, and derivative control [11]. According to [12], cascade control has the benefits of faster response and better disturbance rejection
a hybrid of fuzzy and pid controller for servo electro PDF ePub Mobi Download a hybrid of fuzzy and pid controller for servo electro PDF, ePub, Mobi Books a hybrid of fuzzy and pid controller for servo electro PDF, ePub, Mobi Page 1. a hybrid of fuzzy and pid controller for servo electro feature 9 inch All Terrain Pneumatic front wheels in a four wheel design for maximum freedom and stability
CHAPTER 11 DIGITAL CONTROL McMaster University
The PID controller algorithm involves three separate constant parameters, and is accordingly sometimes called three – term control: the proportional, the integral and derivative values, denoted P, I, and D. Simply put, these values can be interpreted in terms of
UNESCO – EOLSS SAMPLE CHAPTERS CONTROL SYSTEMS, ROBOTICS, AND AUTOMATION – Vol. XX – Ship Steering – Job van Amerongen ©Encyclopedia of Life Support Systems (EOLSS)
robustness of PID controller. Many researchers have been studying various new Many researchers have been studying various new control techniques in order to improve the system performance [4-5]. – history of political thought by mukherjee and ramaswamy pdf A PID controller is a complex but powerful operand. It is used to reduce “error” values in control systems, driving the measured variable towards a specified setpoint. (Contains excerpts from …
• Building Management Systems are scalable from one to many devices. • Can use standard open protocols to communicate to other systems • Allow for distributed control functionality with …
PDF v f Using PID and Encoder En – Download as PDF File (.pdf), Text File (.txt) or read online. Scribd is the world’s largest social reading and publishing site. Search Search
D800002X122 March 2006 TM Getting Started With Your DeltaV™ Digital Automation System
DESIGN AND ANALYSIS OF DIGITAL PID CONTROLLER
PDF v f Using PID and Encoder En Control Theory

PID Control California Institute of Technology
CHAPTER 8 THE PID CONTROLLER McMaster University

Multi Loop Temperature Controllers Eurotherm
Review of fractional PID controller ScienceDirect
Getting Started With Your DeltaV Digital Automation System
https://en.wikipedia.org/wiki/Integral_windup
Discrete-time PID Controller Implementation www.scilab.org
– The inverted Pendulum A fundamental Benchmark in Control
Force Controlled Hexapod Walking QUT

A Fuzzy Controller for Blood Glucose-Insulin System
ALL DIGITAL DESIGN AND IMPLEMENTAION OF PROPORTIONAL
DESIGN AND ANALYSIS OF DIGITAL PID CONTROLLER
CHAPTER 11 DIGITAL CONTROL McMaster University
Software PID Control of an Inverted Pendulum Using the PIC16F684. AN964 DS00964A-page 2 2004 Microchip Technology Inc. BASE PLATFORM The base platform is a 3-point platform, 2 wheels (one of which is geared and attached to a DC motor) and an audio jack. When the DC motor is turned on, the base platform will rotate around in a circle with the center of the axis of rotation being the audio jack
feedback controller. • Tune a digital PID . Outline of the lesson. • Brief history of control equipment • Sampling the measurement • Digital PID calculation • Effect of digital execution period on tuning and performance CHAPTER 11: DIGITAL CONTROL. CHAPTER 11: DIGITAL CONTROL A BRIEF HISTORY OF PROCESS CONTROL • A little history helps us to understand the common …
TWO DEGREE OF FREEDOM PID CONTROLLER DESIGN USING GENETIC ALGORITHMS DANIEL CZARKOWSKI , TOM O’MAHONY Polish Register of Shipping, Electrical and Automation Department,
In the early history of automatic process control the PID controller was implemented as a mechanical device in steering system of Ships PID temperature controllers are applied in industrial ovens, plastics injection machinery, hot stamping machines and packing industry.
• Building Management Systems are scalable from one to many devices. • Can use standard open protocols to communicate to other systems • Allow for distributed control functionality with …
D800002X122 March 2006 TM Getting Started With Your DeltaV™ Digital Automation System
The PID controller can be used in a graphical mode by invoking the PID Controller widget and using function pid controller widget(). In the graphical mode all parameters are set by choosing corresponding options. The proportional, integral and derivative gains can be entered manually or they can be determined by auto-tuning. The auto-tuning is based on the Ziegler–Nichols method, with the
The PID controller algorithm involves three separate constant parameters, and is accordingly sometimes called three – term control: the proportional, the integral and derivative values, denoted P, I, and D. Simply put, these values can be interpreted in terms of
Review of fractional PID controller ScienceDirect
MOTOR SPEED CONTROLLER FOR DIFFERENTIAL WHEELED
PDF v f Using PID and Encoder En Control Theory
PID controller based walking, the LCNN controller was trained to generate a torque depending on the current three joint angles and the three reaction force components on the tip of a given leg.
Evolving PID tuning rules Control Engineering
Discrete-time PID Controller Implementation http://www.scilab.org
1 Basics of PID Control 1.1 Introduction A Proportional–Integral–Derivative(PID) controlleris a three-termcontroller that has a long history in the automatic control field, starting from the be-
Force Controlled Hexapod Walking QUT
The inverted Pendulum A fundamental Benchmark in Control
PID Control California Institute of Technology
1. Introduction. Currently, fractional order controllers are being extensively used by many scientists in order to achieve the most robust performance of the systems , , , , , . The fractional PID controller was introduced by I. Podlubny in 1994 for a fractional order system.
PID-Controller Rawbots Wiki FANDOM powered by Wikia
The inverted Pendulum A fundamental Benchmark in Control
Part I: Discrete PID Gains as Functions of Sampling Time. In our previous article Digital PID Controllers, we discussed some basics of PID controller implementation as software algorithm on a …
CHAPTER 8 THE PID CONTROLLER McMaster University
Force Controlled Hexapod Walking QUT
PID-Controller Rawbots Wiki FANDOM powered by Wikia